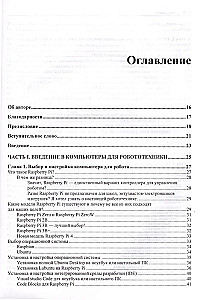

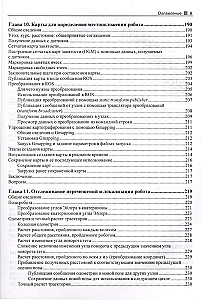
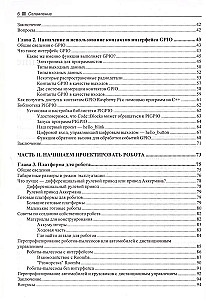

Практическая робототехника. C++ и Raspberry Pi
Рассказано о технологии создания автономных роботов на базе одноплатного компьютера Raspberry Pi и о разработке программ для них на языке С++. Показаны принципы написания и даны примеры кода для контроллера привода двигателя, продемонстрированы способы использования датчиков для обнаружения препятствий и...
построения карт на основе данных лидара. Описаны методы разработки собственных алгоритмов автономного планирования траектории движения, приведен код для автоматической отправки путевых точек контроллеру привода. Рассмотрены библиотеки С++ для написания программ картографии и навигации автономных роботов, даны сведения об использовании контактов аппаратного интерфейса Raspberry Pi GPIO. Электронный архив на сайте издательства содержит код описанных в книге программ.
Автор: Ллойд Бромбах
Издательство: BHV
Возрастные ограничения: 16+
Год издания: 2023
ISBN: 9785977512008
Кол-во страниц: 448
Размер: 232x164x2 мм
Тип обложки: мягкая
Вес: 572 г
ID: 1699419
Есть на складе
€ 25.99
Доставим в США 7 июля (Вт):
Курьером
от € 38.94
Бестселлеры
Бестселлер
€ 13.19
Есть на складе
К себе нежно. Книга о том, как ценить и беречь себя
Ольга Примаченко
€ 6.89
Есть на складе
€ 5.19
Есть на складе

€ 9.29
Есть на складе
Выбор. О свободе и внутренней силе человека
Эдит Ева Эгер, Эсме Швалль-Вейганд
€ 30.09
Есть на складе